
 فقط پیامک (09010609492)
فقط پیامک (09010609492)

طراحی مکانیزم ها دانشگاه کالیفرنیا آمریکا
Mechanism Design
طراحی مکانیزم ها دانشگاه کالیفرنیا آمریکا آموزشی جامع و کم نظیر از طراحی مکانیزم ها می باشد. الگوی آموزشی این کتاب مبتنی بر آموزش با توضیحات کامل به همراه مثال های کاربردی و مفهومی و محاسبات مربوطه می باشد...
محصولات مرتبط




طراحی مکانیزم ها دانشگاه کالیفرنیا آمریکا
(Mechanism Design)
آموزشی جامع و کم نظیر از طراحی مکانیزم ها می باشد. الگوی آموزشی این کتاب مبتنی بر آموزش با توضیحات کامل به همراه مثال های کاربردی و مفهومی و محاسبات مربوطه می باشد.
آموزش طراحی مکانیزم ها دانشگاه کالیفرنیا آمریکا (Mechanism Design) مشتمل بر 311 صفحه، در 11 فصل، به زبان انگلیسی روان و به همراه تصاویر و روابط ریاضی، به ترتیب زیر گردآوری شده است:
Mechanism Design - Enumeration of Kinematic Structures According to Function
Chapter 1: Introduction
- Introduction
- A Systematic Design Methodology
- Links and Joints
- Kinematic Chains, Mechanisms, and Machines
- Kinematics of Mechanisms
- Planar, Spherical, and Spatial Mechanisms
- Kinematic Inversions
- Summary
- References
Chapter 2: Basic Concepts of Graph Theory
- Degree of a Vertex
- Walks and Circuits
- Connected Graphs, Subgraphs, and Components
- Articulation Points, Bridges, and Blocks
- Parallel Edges, Slings, and Multigraphs
- Directed Graph and Rooted Graph
- Complete Graph and Bipartite
- Graph Isomorphisms
- Tree
- Planar Graph
- Spanning Trees and Fundamental Circuits
- Euler’s Equation
- Topological Characteristics of Planar Graphs
- Matrix Representations of Graph
- Adjacency Matrix
- Incidence Matrix
- Circuit Matrix
- Path Matrix
- Contracted Graphs
- Dual Graphs
- Summary
- References
- Exercises
Chapter 3: Structural Representations of Mechanisms
- Introduction
- Functional Schematic Representation
- Structural Representation
- Graph Representation
- Advantages of Using Graph Representation
- Matrix Representation
- Adjacency Matrix
- Incidence Matrix
- Summary
- References
- Exercises
Chapter 4: Structural Analysis of Mechanisms
- Introduction
- Correspondence Between Mechanisms and Graphs
- Degrees of Freedom
- Loop Mobility Criterion
- Lower and Upper Bounds on the Number of Joints on a Link
- Link Assortments
- Partition of Binary Link Chains
- Structural Isomorphism
- Permutation Group and Group of Automorphisms
- Group
- Group of Automorphisms
- Identification of Structural Isomorphism
- Identification by Classification
- Identification by Characteristic Polynomial
- Optimum Code
- Degree Code
- Partially Locked Kinematic Chains
- Summary
- References
- Exercises
Chapter 5: Enumeration of Graphs of Kinematic Chains
- Introduction
- Enumeration of Contracted Graphs
- Enumeration of Conventional Graphs
- Atlas of Graphs of Kinematic Chains
- Summary
- References
- Exercises
Chapter 6: Classification of Mechanisms
- Introduction
- Planar Mechanisms
- Planar Linkages
- Planar Geared Mechanisms
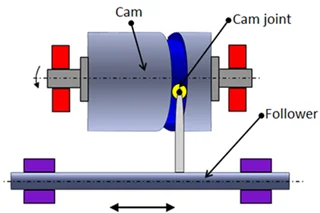
- Planar Cam Mechanisms
- Spherical Mechanisms
- Spatial Mechanisms
- Spatial One-dof Mechanisms
- Spatial Multi-dof, Multiple-Loop Mechanisms
- Summary
- References
- Exercises
Chapter 7: Epicyclic Gear Trains
- Introduction
- Structural Characteristics
- Buchsbaum–Freudenstein Method
- Genetic Graph Approach
- Parent Bar Linkage Method
- Mechanism Pseudoisomorphisms
- Atlas of Epicyclic Gear Trains
- One-dof Epicyclic Gear Trains
- Two-dof Epicyclic Gear Trains
- Three-dof Epicyclic Gear Trains
- Kinematics of Epicyclic Gear Trains
- Fundamental Circuit Equations
- Examples and Summary
- References
- Exercises
Chapter 8: Automotive Mechanisms
- Introduction
- Variable-Stroke Engine Mechanisms
- Functional Requirements
- Structural Characteristics
- Enumeration of VS-Engine Mechanisms
- Constant-Velocity Shaft Couplings
- Functional Requirement
- Structural Characteristics
- Enumeration of C-V Shaft Couplings
- Automatic Transmission Mechanisms
- Functional Requirements
- Structural Characteristics
- Enumeration of Epicyclic Gear Mechanisms
- Canonical Graph Representation of EGMs
- Structural Characteristics of Canonical Graphs
- Enumeration of Canonical Graphs
- Identification of Fundamental Circuits
- Detection of Transfer Vertices
- Atlas of Epicyclic Gear Transmission Mechanisms
- Summary
- References
- Exercises
Chapter 9: Robotic Mechanisms
- Introduction
- Parallel Manipulators
- Functional Requirements
- Structural Characteristics
- Enumeration of Planar Parallel Manipulators
- Enumeration of Spherical Parallel Manipulators
- Enumeration of Spatial Parallel Manipulators
- Robotic Wrist Mechanisms
- Functional Requirements
- Structural Characteristics
- Enumeration of Three-dof Wrist Mechanisms
- Summary
- References
- Exercises
Chapter 10: Solving m Linear Equations in n Unknowns
- Solving One Equation in n Unknowns
- Solving m Equations in n Unknowns
- References
Chapter 11: Atlas
- Atlas of Contracted Graphs
- Atlas of Graphs of Kinematic Chains
- Atlas of Planar Bar Linkages
- Atlas of Spatial One-dof Kinematic Chains
- Atlas of Epicyclic Gear Trains
- Atlas of Epicyclic Gear Transmission Mechanisms

جهت خرید آموزش طراحی مکانیزم ها دانشگاه کالیفرنیا آمریکا به مبلغ استثنایی فقط 20000 تومان و دانلود آن بر لینک افزودن به سبد خرید در پنجره بالا کلیک نمایید.
!!لطفا قبل از خرید از فرشگاه اینترنتی برتر فایل قیمت محصولات ما را با سایر محصولات مشابه و فروشگاه ها مقایسه نمایید!!








دیدگاه خود را بنویسید